OpenCV学习 day1
import os # 导入os库,用于文件路径操作
import cv2 # 导入OpenCV库,用于图像处理
# 读取图像文件,使用os.path.join构建路径确保跨平台兼容性
# 图像位于当前目录下的data文件夹中,文件名为bird.jpg
img = cv2.imread(os.path.join('.', 'data', 'bird.jpg'))
# 将彩色图像转换为灰度图像,以便进行后续的阈值处理
img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 对灰度图像进行阈值处理,生成二值图像
# 参数说明:
# img_gray: 输入的灰度图像
# 110: 阈值,像素值大于此值的将被处理
# 255: 最大值,用于设置超过阈值的像素值
# cv2.THRESH_BINARY_INV: 二值化类型,此处为反向二值化(小于阈值的像素设为最大值,大于阈值的设为0)
ret, img_thresh = cv2.threshold(img_gray, 110, 255, cv2.THRESH_BINARY_INV)
# 查找图像中的轮廓
# 参数说明:
# img_thresh: 输入的二值图像
# cv2.RETR_TREE: 轮廓检索模式,检索所有轮廓并构建完整的层次结构
# cv2.CHAIN_APPROX_SIMPLE: 轮廓近似方法,仅存储轮廓的端点
contours, hierarchy = cv2.findContours(img_thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
# 遍历所有找到的轮廓
for cnt in contours:
# 计算当前轮廓的面积
print(cv2.contourArea(cnt))
# 过滤掉面积较小的轮廓(面积大于200的才进行处理)
if cv2.contourArea(cnt) > 200:
# 绘制轮廓(当前被注释掉)
# cv2.drawContours(img, [cnt], -1, (0, 255, 0), 2)
# 计算轮廓的边界矩形
# 返回值:x, y(矩形左上角坐标),w, h(矩形宽度和高度)
x, y, w, h = cv2.boundingRect(cnt)
# 在原始图像上绘制边界矩形
# 参数说明:
# img: 要绘制的图像
# (x, y): 矩形左上角坐标
# (x+w, y+h): 矩形右下角坐标
# (0, 0, 255): 矩形颜色,此处为红色(BGR格式)
# 2: 矩形线条宽度
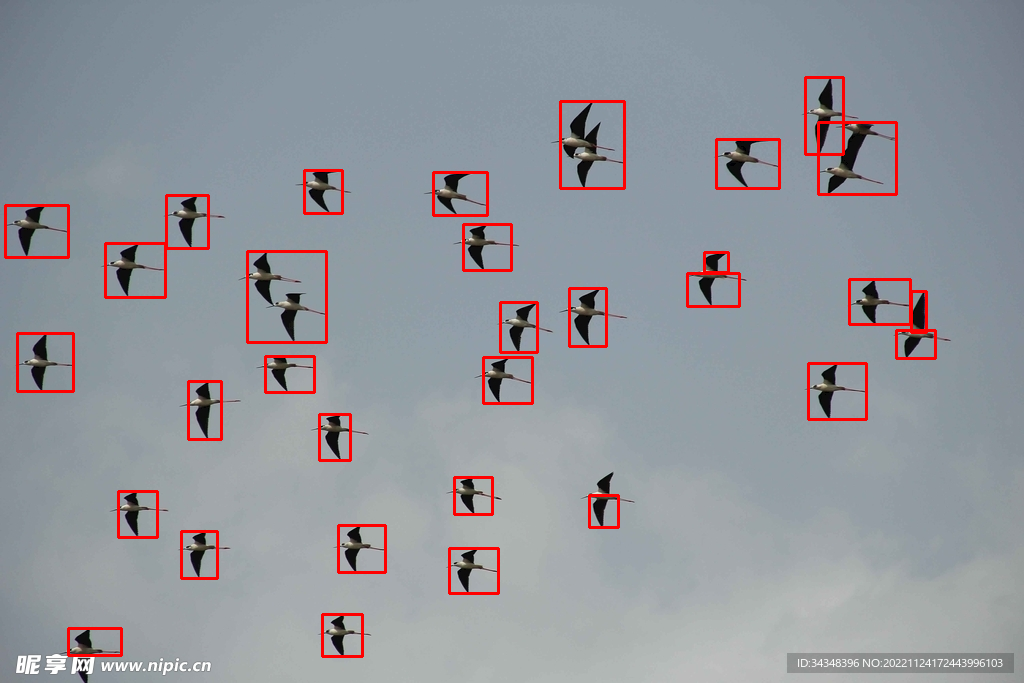
cv2.rectangle(img, (x, y), (x+w, y+h), (0, 0, 255), 2)
# 显示原始图像(已绘制边界矩形)
cv2.imshow('img', img)
# 显示阈值处理后的二值图像
cv2.imshow('img_thresh', img_thresh)
# 等待用户按下任意键,参数0表示无限等待
cv2.waitKey(0)原图

效果图